CAD2UT est un logiciel de planification hors ligne automatisé pour les inspections par écho d'impulsion de pièces simples et complexes. Il utilise les informations de courbure de la pièce pour créer automatiquement des chemins d'inspection UT qui couvrent toute la surface de la pièce avec les passes de numérisation minimales. Cela se fait en aplatissant la géométrie 3D d'origine avant d'appliquer un scan raster 2D et pour reconstruire le chemin du scan 3D en appliquant une transformation inverse. Cela conduit à un mouvement plus simple adapté aux balayages raster UT et permet l'utilisation d'instruments à ultrasons de milieu de gamme équipés de 2 entrées encodeur.
Ce logiciel spécialement conçu pour l'UT remplace le «Teach Pendant» comme moyen de générer des trajectoires. Le processus commence par un fichier STEP de la surface du composant pour créer un maillage triangulaire de la surface. CAD2UT génère un chemin d'inspection sous forme de balayage raster en utilisant les informations de courbure pour ajuster dynamiquement l'indexation entre deux passes. Quatre méthodes de génération de chemin ont été développées et mises en œuvre pour s'adapter à la plupart des géométries inspectées par ultrasons. Le chemin est directement exporté vers un logiciel de simulation de robot tel que ROBODK, puis exporté sous forme de plan de numérisation pour les robots ou les machines cartésiennes.
Les étapes du processus sont les suivantes:
1- 3D STEP FILE Importation de fichier d'étape 3D
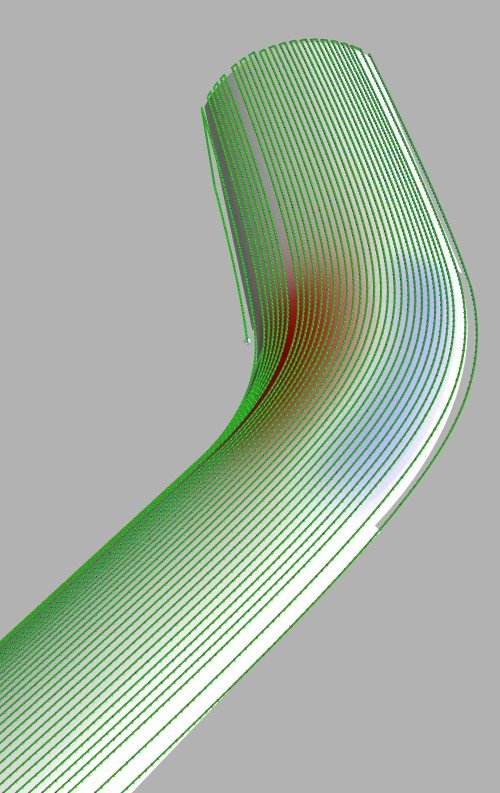
2- Maillage de surface
3- Aplatissement
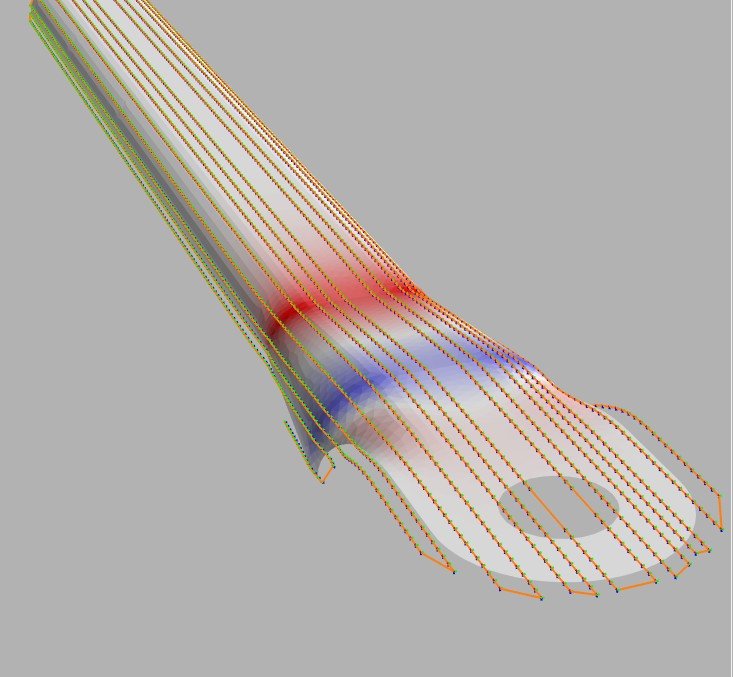
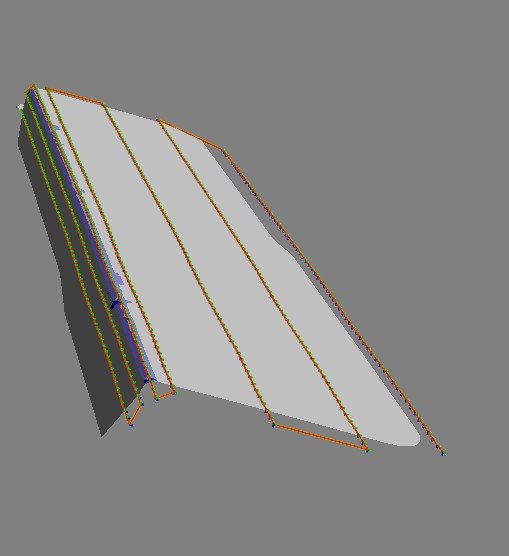
4- Génération de chemins
5- G ou codes Robot
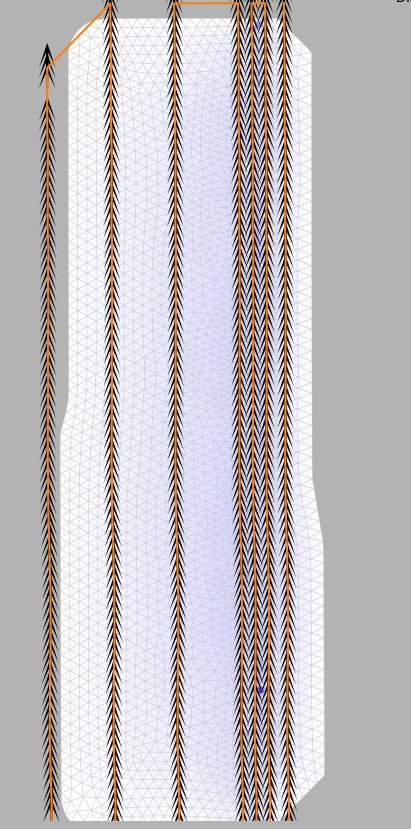
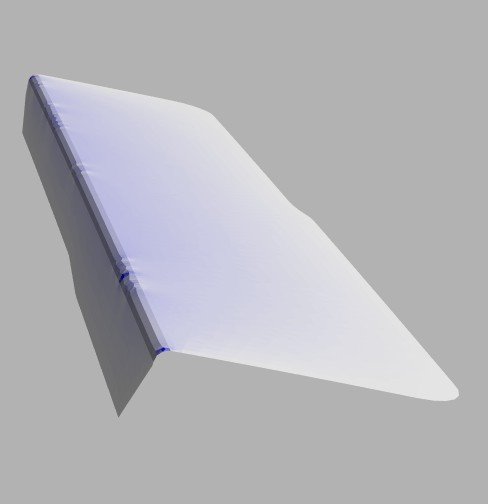

L'aplatissement est un mappage d'une surface incurvée 3D incorporée à un plan. Ceci est fait pour automatiser la création de chemin dans deux directions et pour convertir les espaces 3D en coordonnées d'index de balayage utilisées par l'instrumentation UT. Le processus d'aplatissement permet de revenir en arrière entre les représentations de pièces 2D et 3D. Les directions de balayage et d'index sont déterminées à l'aide d'une analyse en composantes principales.